
Elcon Models IMPACT
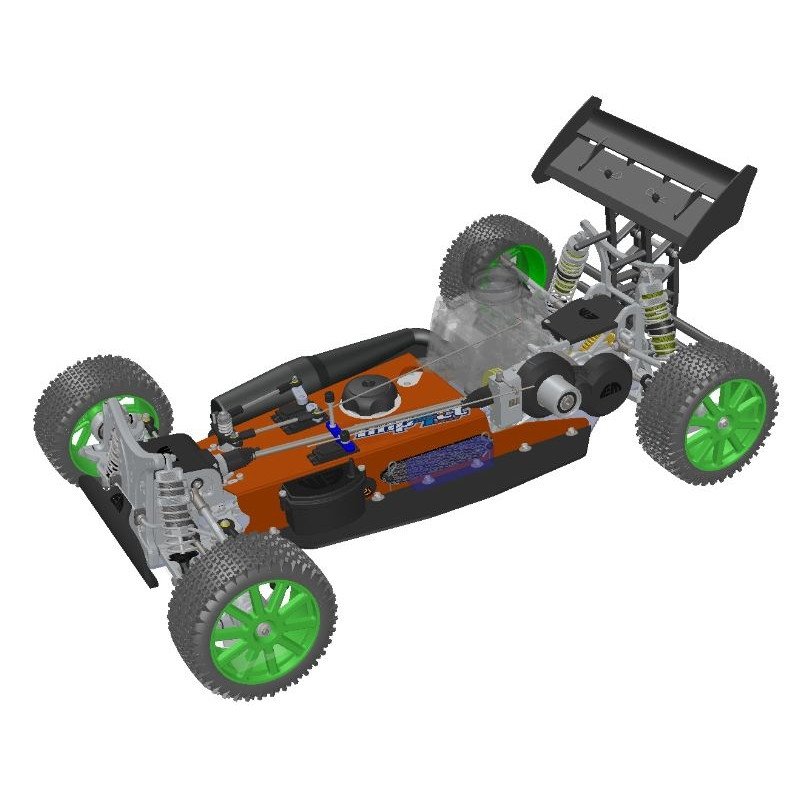
The car is a robust system with a bottom chassis on which a 1 piece upper chassis is mounted. The bottom and upper chassis mounted together can be compared to a monocoque system. The complete chassis is herewith very rigid and rock solid. As all electronics are mounted and connected to the upper chassis part, it can be seen as 2 main modules: car and electronics. It is easy to seperate the upper- from the bottom chassis. Very handy to have car and electronics seperated when cleaning!
The car has a fixed drive system directly to the front and rear and uses the maximum advantage of drive to all 4 wheels. As at all times both front- and rear drive train are driven. The well known effect in 4WD's of the front inner wheel 'balooning' when on-power is gone. Instead of one wheel rotating in the air using up all engine power, now this engine power is brought down to the ground. You will accelerate instead. With no middle dif, there is also no (rotation) mass of the middle dif. This reduces the (rotational) energy needed to move the car forward. Hence this part of the energy from the engine is now fully used for acceleration of the car!
The front geometry of the IMP4CT is designed with the front wheels as the most forward part of the car. In the event of a nose landing, the car will continue to roll on its front wheels and not flip over. Many other cars tend to flip over, due to the nose of the car crashing into the earth. At the IMP4CT the nose is behind the front wheels. Furtheron the steering geometry and steering angle has been optimized and maximized. By putting the front CVD drive shafts slightly backwards, a bigger steering angle is achieved compared to other 4WD's. Hence tigther cornering is possible. The placement of the steering linkages is optimized and eliminates almost all bump steer.
The complete steering system travels ultra light L/R as it has ball bearings throughout. Only where high impact forces and loads are on the car, on these spots are used plastic bushings with a stainless inner bushing. These are designed to take high impact forces. Two small high-voltage servos for steering is all you need and does the job on this full blood race machine. They secure a quick responsive steering and contribute to a lower total weight of the car.
The central drive shaft runs non conventional over the upper chassis. In the case you need to work on this, then the drive shaft can be removed quickly together with its gear boxes. It is foremost pleasant you can directly check on this important part of the drive train and that you can access it directly, without taking apart half of your car!
Of course from race experience we have implemented the ball drive system. It is not only stable, reliable and robust, but also ensures a much higher life time then the dog-bone system. You will find the ball drive system on the central drive shaft, rear drive shafts and at the differential side of the front CVD drive shaft.
Customer friendly and designed to race at the highest level, were our main aims for the IMP4CT. Hence, we tried to reduce the amount of spare parts needed, without touching race geometry. This is achieved to design, where possible, the same components and have them exchanged throughout the car:
